


3.3. Многопозиционные методы модуляции
Анализ методов модуляции, рассмотренных в п.3.2, показывает, что двоичные системы передачи имеют максимальную удельную скорость передачи 2 бит/с*Гц, которую иногда называют скоростью Найквиста.
Повысить удельную скорость передачи информации можно за счет использования m -позиционной АМ или ОФМ. В этом случае один элемент линейного сигнала несет информацию о большем числе символов данных, чем в двоичных (двухпозиционных) системах.
Рассмотрим идею формирования m -позиционных методов модуляции на примере двукратной и трехкратной ОФМ с помощью амплитудно-фазовых (векторных) диаграмм.
На рис.3.16 представлены амплитудно-фазовые диаграммы дня ОФМ, ДОФМ, ТОФМ.
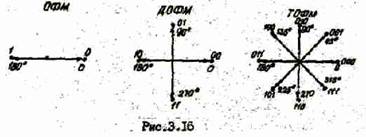
Как видно из рис.3.16, для ОФМ число значащих позиций сигнала данных m=2 со значениями фазы 0°, что соответствует символу 0, и 1800 -символу 1. При ДОФМ m=4 со значениями фаз 00, 900, 1800, 2700 и каждому вектору сигнала ставиться в соответствие два бита данных (дибита) 00, 01, 10, 11. аналогично при ТОФМ m=8 со значениями фаз 00, 450, 900, … 3150 и каждый векторсигнала соответствует трем битам данных (трибитам) 000, 001, … 111.
Число двоичных символов данных k, равное кратности фаз, из-за удобства реализации должно быть целым. Для ОФМ k=1, для ДОФМ k=2 и для ТОФМ k=3. С числом значащих позиций сигнала данных m оно связано соотношением ![]() .
.
Таким образом, скорость передачи битов данных ![]() для дискретных каналов с многократной ОФМ определяется выражением (2.2) или
для дискретных каналов с многократной ОФМ определяется выражением (2.2) или ![]() , где N - скорость передачи единичных элементов (скорость модуляции).
, где N - скорость передачи единичных элементов (скорость модуляции).
Следовательно, применение k - кратной ОФМ позволяет получить удельную скорость передачи в к раз большую, чем однократная ОФМ.
Двоичные системы модуляции называют простыми, а многопозиционные - сложными. Если значащими позициями является изменения не только фазы, но и амплитуды сигнала, то такие методы модуляции называют амплитудно-фазовыми (АФМ), или комбинированными.
Получила также распространение квадратурная АМ (КАМ), которая создается объединением двух независимых АМ-ДБП сигналов, несущие колебания которых сдвинуты относительно друг друга по фазе на 90° (т.е. находятся в квадратуре). Суммарный сигнал для KAМ имеет вид:

где 
a  - импульсные характеристики формирующих фильтров. Амплитудно-фазовая диаграмма для КАМ аналогична ДОФМ только со сдвигом на 450.
- импульсные характеристики формирующих фильтров. Амплитудно-фазовая диаграмма для КАМ аналогична ДОФМ только со сдвигом на 450.
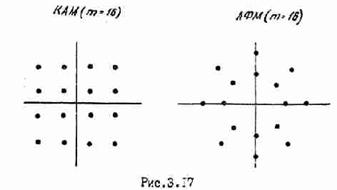
Установлено, что при числе позиций сигнала m > 8 более эффективное использование пространства сигналов при достаточно высоком соотношении сигнал-шум достигается в системах с КАМ и АФМ.
На рис.3.17 представлены амплитудно-фазовые диаграммы для КAM (m=16) и АФМ(m=1б). Для лучшей наглядности на двумерной плоскости сигналы изображены точками, а не векторами.
3.3.1. Многопозиционная ОФМ
На практике среди многопозиционных методов модуляции наиболее широкое применение нашли многократные ОФМ (ДОФМ, ТОФМ и т.д.).
При многократной ОФМ каждой комбинации двоичных информационных символов ставится в соответствие определенное изменение фазы несущей частоты. Если к - символов, то общее число комбинаций равно  ,следовательно необходимо иметь
,следовательно необходимо иметь ![]() значений фазовых сдвигов несущий частоты. Обычно эти сдвиги выбираются равными
значений фазовых сдвигов несущий частоты. Обычно эти сдвиги выбираются равными  = 90° и
= 90° и  = 45° (для ДОФМ и Т0ФМ соответственно).
= 45° (для ДОФМ и Т0ФМ соответственно).
В качестве примера в табл.3.1 приведено правило кодирования для ДОФМ, а на рис.3.16 амплитудно-фазовая диаграмма (первый вариант). Анализ показывает, что второй вариант фазового сдвига более приемлем с точки зрения возможности выделения тактовой частоты. Демодулятор ДОФМ реализуется так, что при сдвиге фаз между предыдущей и последующей посылками  = 45° на выходе получается 00, при
= 45° на выходе получается 00, при  =2250 на выходе - 11, при
=2250 на выходе - 11, при  на выходе - 01, при
на выходе - 01, при  - 10. Таким образом пои ДОФМ обеспечивается вдвое большая эффективная скорость передачи, поскольку каждое фазовое состояние соответствует не одному биту информации, как при ОФМ, а двум битам. Однако помехоустойчивость ДОФМ ниже чем ОФМ, ввиду меньшей разности фаз между смежными фазовыми состояниями.
- 10. Таким образом пои ДОФМ обеспечивается вдвое большая эффективная скорость передачи, поскольку каждое фазовое состояние соответствует не одному биту информации, как при ОФМ, а двум битам. Однако помехоустойчивость ДОФМ ниже чем ОФМ, ввиду меньшей разности фаз между смежными фазовыми состояниями.
Таблица 3.1
|
1-ый символ |
2-ой |
Сдвиг фаз |
|
|
I вариант |
II вариант |
||
|
0 |
0 |
0 |
450 |
|
0 |
1 |
900 |
1350 |
|
1 |
0 |
2100 |
3150 |
|
1 |
1 |
1800 |
2250 |
Такой же принцип используется и при реализации ТОФМ, однако при этом требуется более сложное оборудование.
Основные параметры УПС на скорости передачи 2400 бит/с (ДОФМ) и 4800 бит/с (ТОФМ) нормируются рекомендациям МККТТ V.26 (V .26 бис) иV.27 (V .27 бис) соответственно.
3.3.2. Устройство преобразований сигналов с амплитудно-фазовой модуляцией
При АФМ одновременно изменяются амплитуда и фаза сигналов, причем каждой комбинации амплитудного уровня и значения фазы соответствует определенная кодовая комбинация исходного кода. Число уровней  и число состояний фазы
и число состояний фазы  должно удовлетворять условию
должно удовлетворять условию  .
.
При АФМ в двухполюсном режиме применяется амплитудно-фазовая модуляция двух несущих сдвинутых друг относительно друга на 90°(МККТТ V .29). При этом результирующий сигнал

при 
или 
при 
Оптимальные значения величины K1 и K2 для m=8 приведены в табл.3.2.
Таблица 3.2
| № сигнала |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
К1 |
3 |
1 |
0 |
-1 |
-3 |
-1 |
0 |
1 |
|
К2 |
0 |
1 |
3 |
1 |
0 |
-1 |
-3 |
-1 |
Отсюда видно, что результирующий сигнал изменяется как по амплитуде, так и по фазе, причем общее число различных сигналов равно m . Так, например, седьмой сигнал можно записать как

При АФМ ОБП используется многоуровневая амплитудная и фазовая модуляция одной несущей. При этом разность между значениями амплитуд сигналов на соседних уровнях выбирается одинаковой.
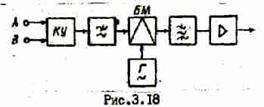
Рассмотрим особенности построения УПС в случае применения АФМ ОБП. В таких системах выбирают m = 4. Упрощенная схема передатчика АФМ ОБП показана на рис.3.18. Основным элементом схемы является кодирующее устройство (КУ) по уровню, который преобразует одинаковые элементы исходного кода в электрические сигналы разного уровня. Уровни сигналов выбраны таким образом, чтобы разность между двумя соседними амплитудами сигнала была постоянной и равной 2/3. На входы КУ поступают последовательности нечетных и четных импульсов, причем нечетные импульсы задерживаются на один такт, поэтому каждый (2i-1)-й импульс появляется одновременно с 2i -м импульсом. Затем полученный сигнал фильтруется и подается на схему формирования однополосного сигнала, которая практически не отличается от аналогичных схем формирования сигналов с AM-ОБП
Рассмотрим более подробно процесс формирования сигнала в КУ по уровню. Пусть на вход А КУ подается нечетная, а на вход В - четная последовательность импульсов (рис.3.19). Алгоритм работы КУ задается табл.3.3.
Таблица 3.3
| Канал А |
Канал В |
Сигнал |
|
1 |
1 |
+U0 |
|
1 |
0 |
+U0/3 |
|
0 |
0 |
-U0/3 |
|
0 |
1 |
-U |
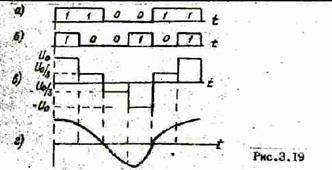
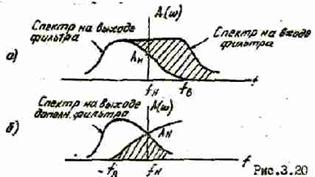
Сигнал, соответствующий передаче последовательности 11, 10, 00, 01 (табл.3.3), изображен на рис.3.19в. Этот сигнал поступает на ФНЧ, напряжение на выходе которого показано на рис.3.19г. Аналоговый сигнал поступает на балансный модулятор, в котором происходит неполное подавление несущей за счет подачи небольшого напряжения смещения совместно с модулирующим сигналом. Поэтому в канал связи подается пилот-сигнал с амплитудой А., (рис.3.20а). Верхняя боковая полоса частот (заштрихованная часть на рис.3.20а) подавляется канальным фильтром, после чего сигнал через усилитель подается в канал связи.
Структурная схема приемника AФМ ОБП приведена на рис.3.21.
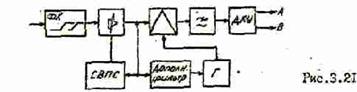
Выделить несущую из сигнала, спектр которого показан на рис.3..20а, с помощью узкополосного фильтра практически невозможно, так как наряду с напряжением несущей одновременно действуют близкие по частоте составляющие, которые также проходят через фильтр. Поэтому сигнал вначале подается на дополнительный фильтр, частотная характеристика которого является зеркальным отображением характеристики канального фильтра относительно несущей частоты  . Спектр сигнала на выходе дополняющего фильтра показан на рис. 3.20б.
. Спектр сигнала на выходе дополняющего фильтра показан на рис. 3.20б.
Дополняющий фильтр содержит фильтр, пропускающий частоты  и модулятор, выделяющий нижнюю боковую полосу частот
и модулятор, выделяющий нижнюю боковую полосу частот . Результирующий спектр сигнала будет симметричным относительно несущей (заштрихован участок на рис.3.20,б). Из этого спектра с помощью схемы А.А.Пистолькорса генераторе опорного напряжения формируется опорное напряжение.
. Результирующий спектр сигнала будет симметричным относительно несущей (заштрихован участок на рис.3.20,б). Из этого спектра с помощью схемы А.А.Пистолькорса генераторе опорного напряжения формируется опорное напряжение.
С целью сохранения неизменными амплитудных соотношений при декодировании сигналов, в схему приемника вводится усилитель с АРУ, работающий от схемы выделения пилот-сигнала (СВПС). Аналоговый сигнал, форма которого повторяет кривую рис.3.19,г, с выхода ФНЧ поступает на декодирующее устройство (ДКУ) по уровню.
Упрощенная структурная схема ДКУ показана на рис.3.22. Входной сигнал подается на два диода, с помощью которых определяется вид сигнала, передаваемого по каналу А. При положительном напряжении сигнала в канале А действует токовый импульс, а при отрицательном - бестоковкй импульс. Остальные элементы схемы определяют вид сигнала, действующего в канале В. Схема состоит из четырех триггеров Шмитта, причем триггеры Т1 и Т4 срабатывают лишь в том случае, когда напряжение на входе достигает значения  . Одновременно при срабатывании триггеров Т1-Т4 срабатывают и триггеры Т2-Т3 пороговое напряжение у которых составляет
. Одновременно при срабатывании триггеров Т1-Т4 срабатывают и триггеры Т2-Т3 пороговое напряжение у которых составляет  . Следовательно, при одновременном срабатывании триггеров Т1 и Т2 или Т3 и Т4 появляются соответственно сигналы на входе схемы И1 или И3, указывающие, что по второму каналу передается токовый импульс. Если триггеры Т1 и Т4 не срабатывает, но срабатывают триггеры Т2 и Т3, то появляется сигнал на выходе схемы И2 или И3, так как на ее второй вход сигналы с выходов триггеров Т1 и Т4 подается соответственно через схемы запрета 1 и 2.
. Следовательно, при одновременном срабатывании триггеров Т1 и Т2 или Т3 и Т4 появляются соответственно сигналы на входе схемы И1 или И3, указывающие, что по второму каналу передается токовый импульс. Если триггеры Т1 и Т4 не срабатывает, но срабатывают триггеры Т2 и Т3, то появляется сигнал на выходе схемы И2 или И3, так как на ее второй вход сигналы с выходов триггеров Т1 и Т4 подается соответственно через схемы запрета 1 и 2.
Декодированный сигнал поступает на дешифратор, который преобразует сигнал укрупненного кода с основанием 4 в два сигнала с основанием 2. Затем с помощью преобразователя кодов формируется последовательность двоичных сигналов данных, выдаваемых потребителю информации.
3.3.3. Реализация УПС на основе цифровой обработки сигналов
Более высокие требования к характеристикам цифровых каналов могут быть удовлетворены лишь с применением методов цифровой обработки сигналов (ЦОС), ориентированных на использование аппаратных и программных средств вычислительной техники.
Широкое использование методов ЦОС в УПС обусловлено, прежде всего, стремлением реализовать помехоустойчивость близкую к потенциальной, и стало возможным вследствие достижений отечественной технологии производства интегральных микросхем.
Реализация цифровых УПС для передачи дискретных сигналов со скоростью 9,6 кбит/с и выше требует решения целого ряда научно-технических задач.
Как отмечалось выше, пределом удельной скорости передачи в двоичных системах является скорость Найквиста 2 бит/с*Гц. Для увеличения удельной скорости необходимо использовать ансамбли сигналов, объем алфавита которых превышает размерность используемого пространства сигналов m. С этой целью прибегают к многопозиционным сигналам. Во многих работах сделан вывод о целесообразности перехода к АФМ, если число позиций сигнала в ансамбле m>8.
При цифровой обработке сигналов необходимо рассмотреть математическую модель передающей и приемной части УПС и обосновать возможные способы реализации тех или иных математических операций. Приемлемость модели можно оценить с помощью программирования на языке высокого уровня.
Большая роль в УПС принадлежит цифровым формирующим фильтрам (ЦФФ), позволяющим получить дискретный сигнал с требуемыми частотно-временными свойствами, и цифровым демодуляторам с корректирующими устройствами, обеспечивающих требуемую точность коррекции и прием сигналов.
В общем случае структурная схема передатчика УПС представлена на рис.3.23.

Цифровой сигнал данных, поступающий от источника, представляет собой синхронную, следующую с интервалом Т, последовательность символов  , принимающих значения из конечного алфавита объемом М, и выполняет роль модулирующего сигнала.
, принимающих значения из конечного алфавита объемом М, и выполняет роль модулирующего сигнала.
Формирование спектра модулирующего сигнала А(t) с заданными свойствами, согласующимися с частотными характеристиками непрерывного канала связи, осуществляется формирующими фильтрами.
В модуляторе УПС, в общем случае, каждому символу или группе из  двоичных символов
двоичных символов  , следующих с частотой
, следующих с частотой , сопоставляется сигнал . При этом используются различные виды модуляции. Окончательное формирование спектра сигнала производится в выходном фильтре передатчика УПС.
, сопоставляется сигнал . При этом используются различные виды модуляции. Окончательное формирование спектра сигнала производится в выходном фильтре передатчика УПС.
В приемнике сигнал вначале проходит через входной полосовой фильтр, ограничивающий мощность шумов. В его состав может входить предварительный корректор частотных характеристик канала связи. Демодулятор преобразует полосовой сигнал в низкочастотный, который поступает в устройство обработки сигнала УПС. Приемное устройство в моменты времени, кратные Т, выносит решение  относительно переданных символов , которые затем поступают в декодер для получения выходной последовательности.
относительно переданных символов , которые затем поступают в декодер для получения выходной последовательности.
В последнее время для среднескоростных и высокоскоростных УПС применяются АФМ, КАМ и др. в совокупности с методами цифровой обработки сигналов.
В литературе рассматривается два возможных метода построения цифровых формирователей модулированных сигналов (ЦФМС).
Первый включает формирование спектра сигнала цифровыми формирующими фильтрами нижних частот (ЦФФНЧ) и затем перенос его с помощью несущего колебания в область частот канала (рис.3.23,а).
Выходной сигнал может быть представлен в виде
где - центральная частота спектра передаваемого сигнала, равная несущей частоте для двухполосных систем;
- импульсная характеристика ЦФФНЧ
Соотношение между входной последовательностью {dk} передатчика и последовательностью параметров модулированного сигнала (an, bn ) задается правилом кодирования, которое определяется видом модуляции.
Данные формирователи генерируют сигналы с параметрами, представленными в табл.3.4 и не позволяют генерировать сигналы с одной боковой полосой.
Таблица 3.4
| Вид модуляции |
Скорость передачи, бит/с |
Скорость модуляции (c-I) |
Значения координат |
Число сигнальных точек |
Частота несущей f Гц |
|
4-фазовая (А) |
2400 |
1200 |
+-1 |
4 |
1800 |
|
4-фазовая (В) |
2400 |
1200 |
0,+-1,+-2 |
4 |
1800 |
|
8-фазовая |
4800 |
1600 |
0,+-1,+-2 |
У |
1600 |
|
АФМ 4х4 |
9600 |
2400 |
0,+-1,+-3,+-5 |
) 16 |
1700 |
|
КАМ 4х4 |
9600 |
2400 |
+-1,+-3 |
16 |
1700 |
|
|
|
|
|
|
|
Структура формирователя на рис.3.23а практически позволяет выбором характеристик ЦФФНЧ генерировать сигналы с любым видом модуляции.
Выходной сигнал схемы рис.3.23а представляется в виде
где ![]() ,
, ![]() - импульсные характеристики ЦФФ.
- импульсные характеристики ЦФФ.
При реализации структуры формирователя берут конечное число элементов сигнала, в том числе и конечной длины импульсные характеристики ЦФФ.
Структура рмс.3.23а требует в основном выполнения арифметических операций и в меньшей мере использует память при формировании сигнала. Поэтому при реализации используется, в основном, аппаратно-программный способ.
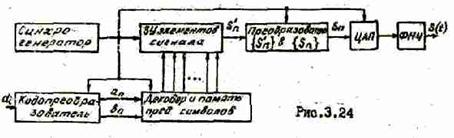
Второй метод построения цифровых формирователей в отличие от первого включает в основном программный способ реализации и формирование спектра сигнала происходит непосредственно в полосе частот канала. Структура формирователя показана на рис.3.24
В основе формирования лежит использование памяти для запоминания элементов сигналов (в качестве которых используется импульсный отклик эквивалентного фильтра Найквиста) и их сопоставление входным данным. В табл.3.5 показаны возможные характеристики формирователей для скорости 2400, 4800, 9600 бит/с.
Такой метод позволяет выделить основные общие элементы множества разнообразных схем модуляции, т.е. практически генерировать любой вид модуляции. С другой стороны, позволяет применять перспективную элементную базу для "построения" передатчика УПС.
Сложность формирования сигналов с помощью такого метода закачается в том, что в случае Е -уровневой модуляции для каждого момента отсчета необходимо запоминать Е элементов сигнала и, кроме того, элементы сигнала представляют функции неограниченные во времени.
С учетом того, что центральная частота модулированного сигнала может быть связана с линейной скоростью модуляции соотношением:

и  , число элементов сигнала может быть конечно.
, число элементов сигнала может быть конечно.
Декодер по паре элементов (an ,bn), возможные значения которых равны 0,0; 0,1; 1,0; 1,1, определяет номер ячейки ЗУ, в которой записан элемент  или
или  (рис.3.24). С частотой
(рис.3.24). С частотой  считываются из ЗУ последовательности
считываются из ЗУ последовательности  , которые соответствуют данной паре элементов и всем предыдущим символам
, которые соответствуют данной паре элементов и всем предыдущим символам 
В преобразователе происходит объединение двух последовательностей. Если в ЗУ записаны непосредственно элементы Sn , то в качестве преобразователя используется интерполирующий фильтр.
Таким образом, при реализации структуры рис.3.24 основное значение при формировании приобретают компоненты , частотные характеристики которых эквивалентны цифровым полосовым формирующим фильтрам. Сложность формирования определяется объемом ЗУ и алгоритмом. Число ячеек ЗУ определяется модуляционным форматом и длиной n*Т элементов сигнала.
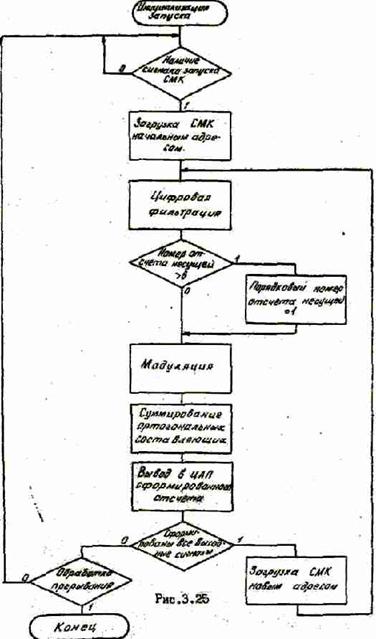
В качестве примера на рис.З.25 представлен алгоритм формирования модулированных сигналов для передачи данных по каналам ТЧ со скоростью 9600 бит/с (рекомендация МККТТ V.29), а на рис.3.23б - математическая модель передатчика УПС, где - частота следования информационной последовательности (9600 Гц);
- частота дискретизации (14400 Гц);
- частота модуляции (2400 Гц);
- импульсные характеристики цифровых фильтров.
Выходной сигнал определяется выражением:
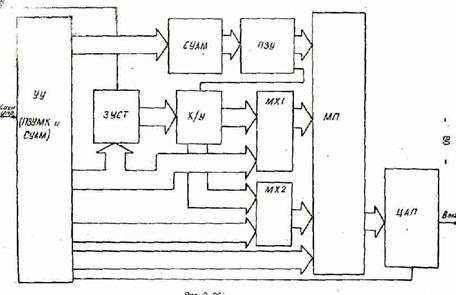
Алгоритм разработан применительно для реализации на микропроцессорных комплектах 1804. Структурная схема формирователя в этом случае представлена на рис.3.26.
Работа схемы, согласно алгоритму и математической модели, осуществляется следующим образом.
При поступлении информации по стыку C1-ФЛ устройство синхронизации и согласования формирует сигналы, инициализирующие запуск счетчика микрокоманд СМК
СМК расположен в секции управления адресом микрокоманд (СУ AM). На схеме рис.3.26 СУ AM и ПЗУ МК объединены в устройство управления (УУ).
Двоичные данные {di} с выхода скремблера, следующие с частотой fg , преобразуются в кодопреобразователе в передаваемые М-ичные символы, характеризуемые компонентами an и bn (синфазная и квадратурная составляющие). Множество всех возможных значений (а, b) в последовательности {an,bn}, определяются для того типа модуляции, который выбран.
Символы следуют с частотой модуляции  где М - число бит в одном символе. С целью более точного формирования аналогового сигнала S(t) его отсчеты отбираются с более высокой частотой интерполяции
где М - число бит в одном символе. С целью более точного формирования аналогового сигнала S(t) его отсчеты отбираются с более высокой частотой интерполяции  .
.
Процесс интерполяции позволяет снизить требования к выходному ФНЧ при фиксированной скорости операций цифрового фильтра или уменьшить скорость обработки при фиксированной точности формирования сигнала, а также снизить аппаратные затраты. Величина  , где c и d, - целые числа. Процедура интерполяции включает при этом увеличение частоты дискретизации в С раз перед цифровой фильтрацией в области нижних частот и последующее уменьшение в d раз.
, где c и d, - целые числа. Процедура интерполяции включает при этом увеличение частоты дискретизации в С раз перед цифровой фильтрацией в области нижних частот и последующее уменьшение в d раз.
В качестве интерполирующего цифрового фильтра, с точки зрения экономии аппаратно-программных затрат к линейности фазовой характеристики, целесообразно применять нерекурсивные цифровые фильтры (НРЦФ), реализуемые в прямой форме.
Это объясняется тем, что при интерполяции из каждых С отсчетов только один ненулевой и именно он требует обработки, а при прореживании выходного сигнала НРЦФ вычисляется каждый i-й отсчет.
Сигналы на выходе блока стробирования равны

На выходе фильтров сигналы представляются сверткой

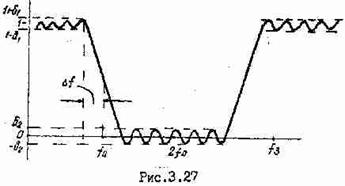
Цифровой формирующий фильтр, характеристика которого приведена на рис.3.27, выполнен в виде интерполирующего НРЦФ. Характеристика фильтра может быть определена неравномерностью  в полосе пропускания, минимальным затуханием
в полосе пропускания, минимальным затуханием  в полосе задерживания, частотой среза
в полосе задерживания, частотой среза  и крутизной
и крутизной  .В данном рассматриваемом случае
.В данном рассматриваемом случае  . Для больших значений числа N коэффициентов фильтра хорошим показателем характеристики НРЦФ является число Д, которое определяется как
. Для больших значений числа N коэффициентов фильтра хорошим показателем характеристики НРЦФ является число Д, которое определяется как

и в большинстве случаев зависит от  и
и  . Сделав преобразования, получим
. Сделав преобразования, получим
Это означает что для постоянных значений N/L и  можно реализовать все схемы модуляции табл.3.4 с помощью одного и того же фильтра. При расчете выбирались значения N/L = 20 и
можно реализовать все схемы модуляции табл.3.4 с помощью одного и того же фильтра. При расчете выбирались значения N/L = 20 и  =0.125, что соответствует значению Д=2,5. Так как характеристика фильтра должна удовлетворять условию Найквиста, то на этапе аппроксимации (методом Фурье) определяются значения затухания в полосах пропускания и задерживания соответственно
=0.125, что соответствует значению Д=2,5. Так как характеристика фильтра должна удовлетворять условию Найквиста, то на этапе аппроксимации (методом Фурье) определяются значения затухания в полосах пропускания и задерживания соответственно

Тая как  =14.4 КГц и
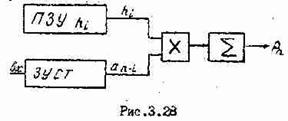
=14.4 КГц и  = 2400 КГц коэффициенты L = 6 и N = 120. Последний определяет емкость запоминающего устройства. Цифровой интерполирующий фильтр выполнен в виде комбинации умножитель - накопитель (рис.3.28), где ПЗУ - для хранения коэффициентов фильтра, ЗУСТ - запоминающее устройство входных N/L сигнальных точек.
= 2400 КГц коэффициенты L = 6 и N = 120. Последний определяет емкость запоминающего устройства. Цифровой интерполирующий фильтр выполнен в виде комбинации умножитель - накопитель (рис.3.28), где ПЗУ - для хранения коэффициентов фильтра, ЗУСТ - запоминающее устройство входных N/L сигнальных точек.
Данные последовательным кодом поступают в запоминающее устройство сигнальных точек (ЗУСТ), которое представляет собой устройство преобразования последовательного кода данных в параллельный (по 4 бита).
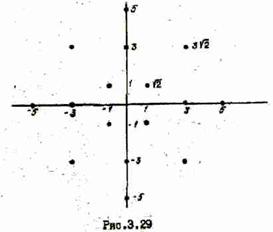
Кроме этого в ЗУСТ осуществляется "относительное кодирование", согласно рекомендации МККТТ (АФМ - 16, 4 фазы х 4 амплитуды Каждая сигнальная точка (а,в) характеризуется не координатами X и У, а относительной "амплитудой"  и "фазой"
и "фазой"  . Входные данные разделяются на группы из 4 бит
. Входные данные разделяются на группы из 4 бит  . Первый бит ( Q1 ) используется для определения относительной амплитуды r новой сигнальной точки, а три оставшиеся бита определяют разность фаз между предыдущей и новой сигнальной точкой. Причем эти три бита получаются путем сложения по mod8 трех бит предыдущей сигнальной точки с тремя битами новой сигнальной точки. Полученные таким образом 4 бита записываются параллельным кодом в ЗУСТ, которое функционирует по принципу FILO (первым вошел, последним вышел). Память ЗУСТ рассчитана на 4x20 бит. Таким образом в ЗУСТ хранятся все 19 предыдущих сигнальных точек.
. Первый бит ( Q1 ) используется для определения относительной амплитуды r новой сигнальной точки, а три оставшиеся бита определяют разность фаз между предыдущей и новой сигнальной точкой. Причем эти три бита получаются путем сложения по mod8 трех бит предыдущей сигнальной точки с тремя битами новой сигнальной точки. Полученные таким образом 4 бита записываются параллельным кодом в ЗУСТ, которое функционирует по принципу FILO (первым вошел, последним вышел). Память ЗУСТ рассчитана на 4x20 бит. Таким образом в ЗУСТ хранятся все 19 предыдущих сигнальных точек.
В табл.3.6 и рис.3.29 представлены все соотношения.
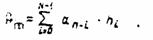
Выходные отсчеты р (n*Ts) и q(n*Ts) могут быть получены путем N/L умножений и N/L суммировании. Здесь N -число коэффициентов импульсной характеристики ЦФФНЧ (в данном случае равно 120), L - фактор интерполяции (равен 6).
Число вычислений может быть изменено если учесть, что сигналы Х. и и Y могут иметь 4 различные абсолютные значения (согласно табл.3.4), два из которых отличаются от 0 и 1..В этом случае  и тогда для p(n-Ts) получим
и тогда для p(n-Ts) получим

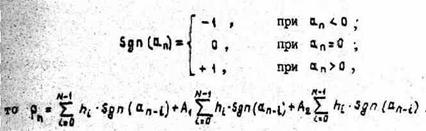
Первое слагаемое для  , второе для
, второе для  , третье для
, третье для 
Таким образом, для подсчета рп достаточно N/L коэффициентов фильтра со значениями I, 0 или -1, трех отдельных суммировании слов, взятых с весом 1, А1 и А2 и, наконец, сложением трех результирующих членов. Указанный метод называется "взвешенным накоплением", а соответствующая схема представлена на рис.3.30. В схеме рис.З.26 накапливающие сумматоры реализованы в виде регистров общего назначения (РОН) Адрес этого регистра определяется при помощи кодопреобразователя Х/У в ЗУСТ и поступает в МП через мультиплексор MXI.
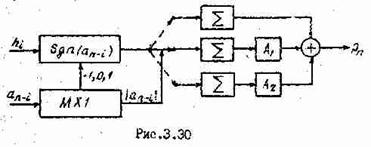
Функция  или же в данном случае код операции (сложение или вычитание или сложение с нулевым операндом) определяется по коду сигнальной точки и знаку коэффициента фильтра. Код операции поступает в МП секцию через мультиплексор МХ2. Операнд ( hi ) поступает в МП секция из ПЗУ образцов. МП выполняет соответствующую операцию и сохраняет в РОН результат этой операции. Число операций определяется числом сигнальных точек в ЗУСТ. После этого УУ вырабатывает микрокоманду, по которой МП производит выполнение операции умножения на А1 и А2 соответствующих РОН и суммирование, для получения результирующего сигнала
или же в данном случае код операции (сложение или вычитание или сложение с нулевым операндом) определяется по коду сигнальной точки и знаку коэффициента фильтра. Код операции поступает в МП секцию через мультиплексор МХ2. Операнд ( hi ) поступает в МП секция из ПЗУ образцов. МП выполняет соответствующую операцию и сохраняет в РОН результат этой операции. Число операций определяется числом сигнальных точек в ЗУСТ. После этого УУ вырабатывает микрокоманду, по которой МП производит выполнение операции умножения на А1 и А2 соответствующих РОН и суммирование, для получения результирующего сигнала  .
.
Аналогичным образом происходит обработка и по другой (квадратурной) ветви для получения сигнала  .
.
После получения  производится модуляция несущей колебанием с учетом предварительного соотношения отсчетов несущего колебания и сигнала.
производится модуляция несущей колебанием с учетом предварительного соотношения отсчетов несущего колебания и сигнала.
